Patricia Quintero Álvarez
 Desde hace más de 30 años, la Robótica ha evolucionado enormemente y principalmente la Robótica Móvil. Sin embargo, el objetivo inicial de los prime-ros investigadores en esta disciplina no se ha alcanzado aún: la creación de una máquina inteligente capaz de percibir, de decidir y de actuar por ella misma. Un robot móvil es un vehículo autónomo, equipado de una unidad de proceso que le proporciona la inteligencia necesaria para desplazarse en un ambiente que puede ser conocido o desconocido. Un robot móvil articulado cuenta, además, con varios módulos interconectados entre sí, y que proporcionan una mayor independencia de carga al vehículo.
Desde hace más de 30 años, la Robótica ha evolucionado enormemente y principalmente la Robótica Móvil. Sin embargo, el objetivo inicial de los prime-ros investigadores en esta disciplina no se ha alcanzado aún: la creación de una máquina inteligente capaz de percibir, de decidir y de actuar por ella misma. Un robot móvil es un vehículo autónomo, equipado de una unidad de proceso que le proporciona la inteligencia necesaria para desplazarse en un ambiente que puede ser conocido o desconocido. Un robot móvil articulado cuenta, además, con varios módulos interconectados entre sí, y que proporcionan una mayor independencia de carga al vehículo.
DOS TIPOS
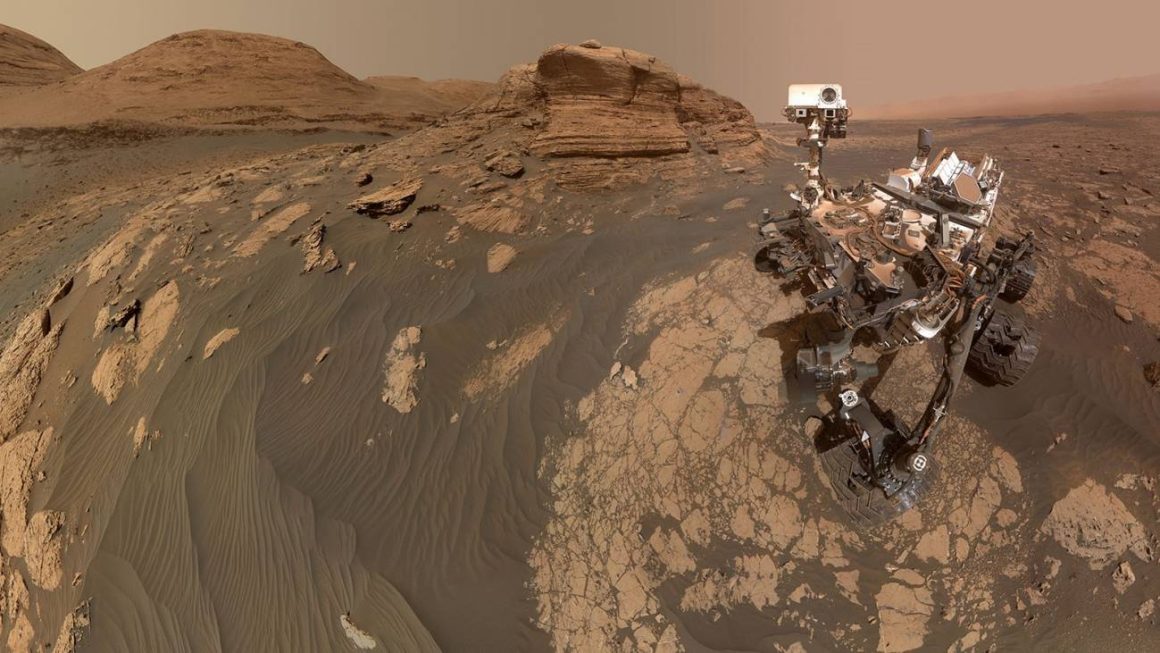
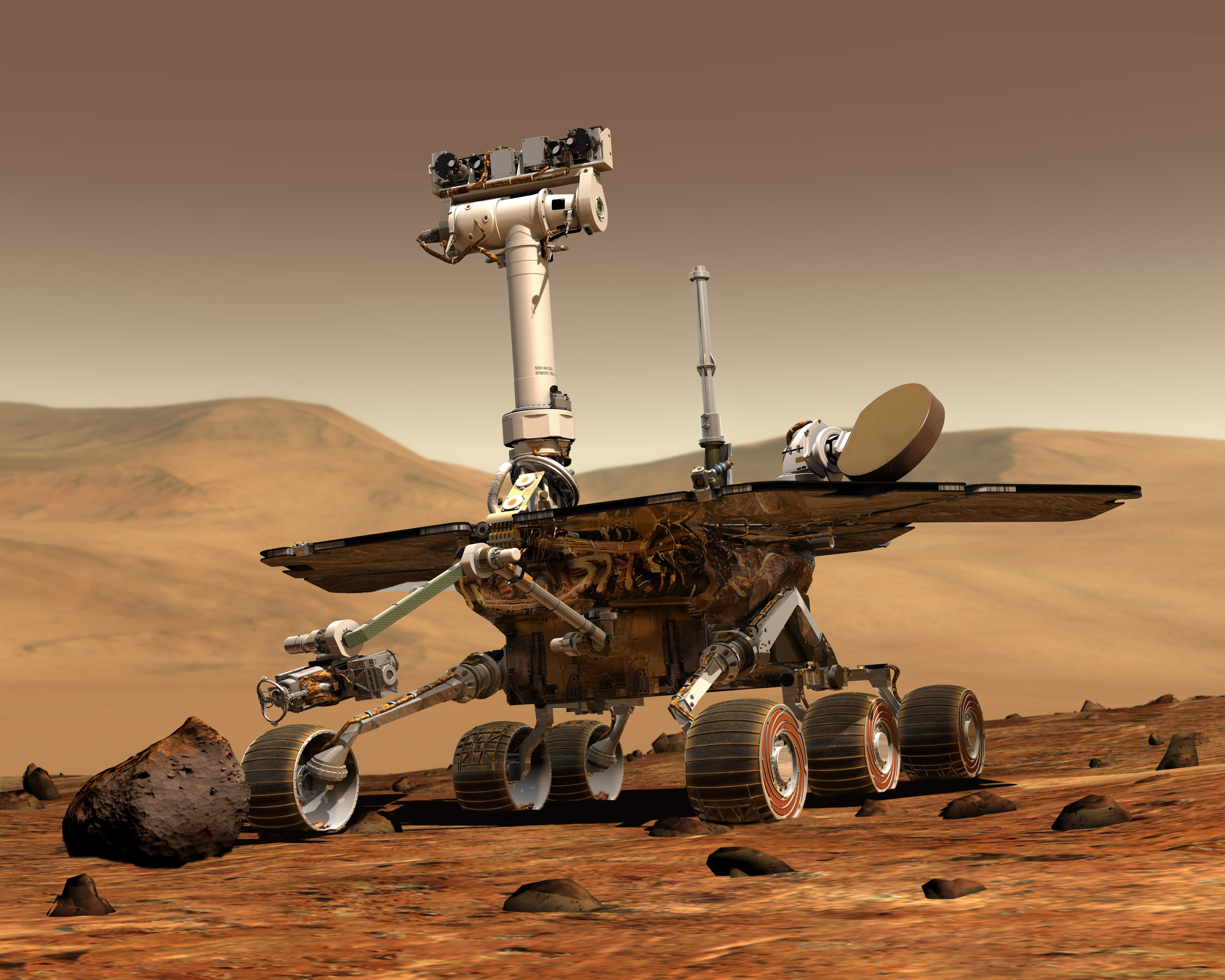
En la literatura científica, existen dos tipos muy diferentes de robots que son llamados robots móviles articulados: por una parte, los robots en los que el chasis es articulado y permite modificar la configuración de las ruedas, para asegurar el contacto con un suelo accidentado, como por ejemplo los robots Rover que se utilizan para la exploración de Marte; y por otra parte, los robots móviles con remolques. Aun cuando para el desempeño de muchos trabajos este tipo de robots presenta grandes ventajas, su principal desventaja estriba en la dificultad de diseñar trayectorias de desplazamiento que garanticen un movimiento seguro y libre de colisiones. Como el objetivo principal de un robot móvil consiste en desplazarse de una posición inicial hasta una posición final con una cierta autonomía, para lograrlo, el robot debe utilizar recursos de tipo informático y mecánico; pero su buen funcionamiento depende también de su capacidad para administrar adecuadamente todos sus recursos. Para ser operacionales, los robots móviles deben poder comunicarse con sus operadores, planear sus tareas y controlar y asegurar la ejecución de tareas planificadas. A partir de la tarea encomendada por los operadores, que pueden ser humanos o máquinas, el robot debe tener la capacidad de planificar la mejor manera de lograr la ejecución de la tarea confiada, a partir de su posición actual. Para ello, el robot debe decidir los puntos por los que debe pasar y las velocidades que debe alcanzar para seguir la trayectoria planificada. Esta información es entonces transformada en una serie de puntos de llegada y de velocidades de consigna, para elaborar las órdenes para los actuadores de dirección y velocidad.
SHAKEY, PRIMER ROBOT MÓVIL
El primer robot móvil, el Shakey, fue creado en 1967 en Stanford, como resultado de investigaciones en el campo de la inteligencia artificial. Este robot estaba dotado de cámaras para percibir el espacio en que se desplazaba, y de dos ruedas motrices para desplazarse. Desde la creación de ese primer robot, muchos otros han sido desarrollados; como, por ejemplo, el robot Pathfinder, y últimamente los robots Spirit y Opportunity, que forman parte de los robots Rover desarrollados por la NASA, y cuyo objetivo es ser utilizados en la exploración del planeta Marte.
Algunas otras de las numerosas aplicaciones que los robots móviles con remolques tienen son:
LA AGRICULTURA AUTÓNOMA
El objetivo de esta área de la investigación es el de permitir a un robot móvil articulado realizar una tarea agrícola. El objetivo general del proyecto consistió en desarrollar una simulación robótica durante el proceso de transferencia de granos durante la siembra. Sin embargo, no es la única aplicación de la robótica móvil en la agricultura. Entre otros, existen: Remolques cisterna Remolques para la transportación de animales Remolques para la vendimia Remolques para la plantación Remolques para la aplicación de fertilizantes.
LA CONSTRUCCIÓN
Algunas investigaciones se han realizado para utilizar los robots móviles articulados para la construcción y el mantenimiento en áreas en construcción. Equipados de un brazo manipulador, pueden transportar materiales y, por ejemplo, ser utilizados para la reparación de fisuras sobre los puentes o para la instalación de la señalización. Existe actualmente un proyecto muy importante en el seno de la AHMTC (Advanced Highway Maintenance and Costruction Technology) de Estados Unidos, para desarrollar y comercializar sistemas de barreras automatizadas. El objetivo es el de utilizar vehículos de seguridad para las autopistas, como barreras motorizadas, con características de absorción de choques, que se utilizarán para proteger a los trabajadores que realizan operaciones de mantenimiento de las autopistas. Estos vehículos representan una barrera física entre los trabajadores y el tráfico de la autopista. Resulta más económico mantener esta barrera motorizada que un vehículo convencional, y puede ser remolcada a un lugar de trabajo por un vehículo mecánicamente desacoplado y acoplado electrónicamente para seguir vehículos de mantenimiento durante sus operaciones.
EL TRABAJO DE OFICINA
Un robot de servicio multifuncional para trabajar en las oficinas.
EL TRANSPORTE
Estos robots también pueden ser utilizados para la transportación de personas, materiales o en los aeropuertos para la transportación del equipaje, por citar algunos usos en esta área. Un ejemplo de robot de este tipo, utilizado para la transportación de personas, es el sistema de transporte automático de personas desarrollado por la Sociedad ROBOSOFT, localizada en Francia. Se trata de dos aplicaciones, una de tipo taxi (transporte individual solicitado), y el otro un transporte de tipo autobús (transporte colectivo pre programado). Estos nuevos modos de transporte pueden ser utilizados en sitios protegidos, que reciben grandes concentraciones de personas, las cuales se deben desplazar en distancias relativamente cortas, del orden de algunas fracciones de kilómetros o algunos pocos kilómetros. Pueden ser utilizados en interiores o en exteriores. Podemos citar algunos lugares donde ya se pueden utilizar: Los centros históricos peatonales y semi peatonales. Los parques industriales y campus académicos, como las fábricas, sitios industriales, los edificios administrativos o de oficinas, los centros de investigación y de alta tecnología, las universidades, los centros de investigación, los laboratorios, etcétera.